schoolUnderstanding and controlling swarm behavior of organisms
With the development of control engineering, researchers can manipulate the movement of artificial objects such as automobiles, hard disks, and drones with high accuracy and reliability. In the case of a hard disk, the reading device requires precision on the order of nanometers. The concept of feedback control plays an indispensable role in designing anti-lock braking systems that are indispensable for automobiles. These significant advances in controlling individual artifacts, both theoretical and applied, occurred in the 20th century.
On the other hand, manipulating the movements of large numbers of non-artificial objects, especially biota, as desired remains a complex problem. They are hard to approach with conventional control engineering alone due to variations in individual characteristics, lack of reliable dynamic models, and non-linearities. Therefore, Wakamiya Lab is working on developing innovative information and communication technology for the guidance of swarm by learning from living organisms while taking advantage of control engineering.
The studied biota is diverse, including livestock, fish, birds, and crowds. We are developing information and communication technology according to the characteristics of each flocking, considering the features of the environment, the range of control measures, and the purpose of guidance. At the same time, by flexibly using both theory and simulation, we will continuously improve the technology by applying the developed technology to actual biological swarms.
For more detail, see website of Prof. Ogura. Below shows a part of research.
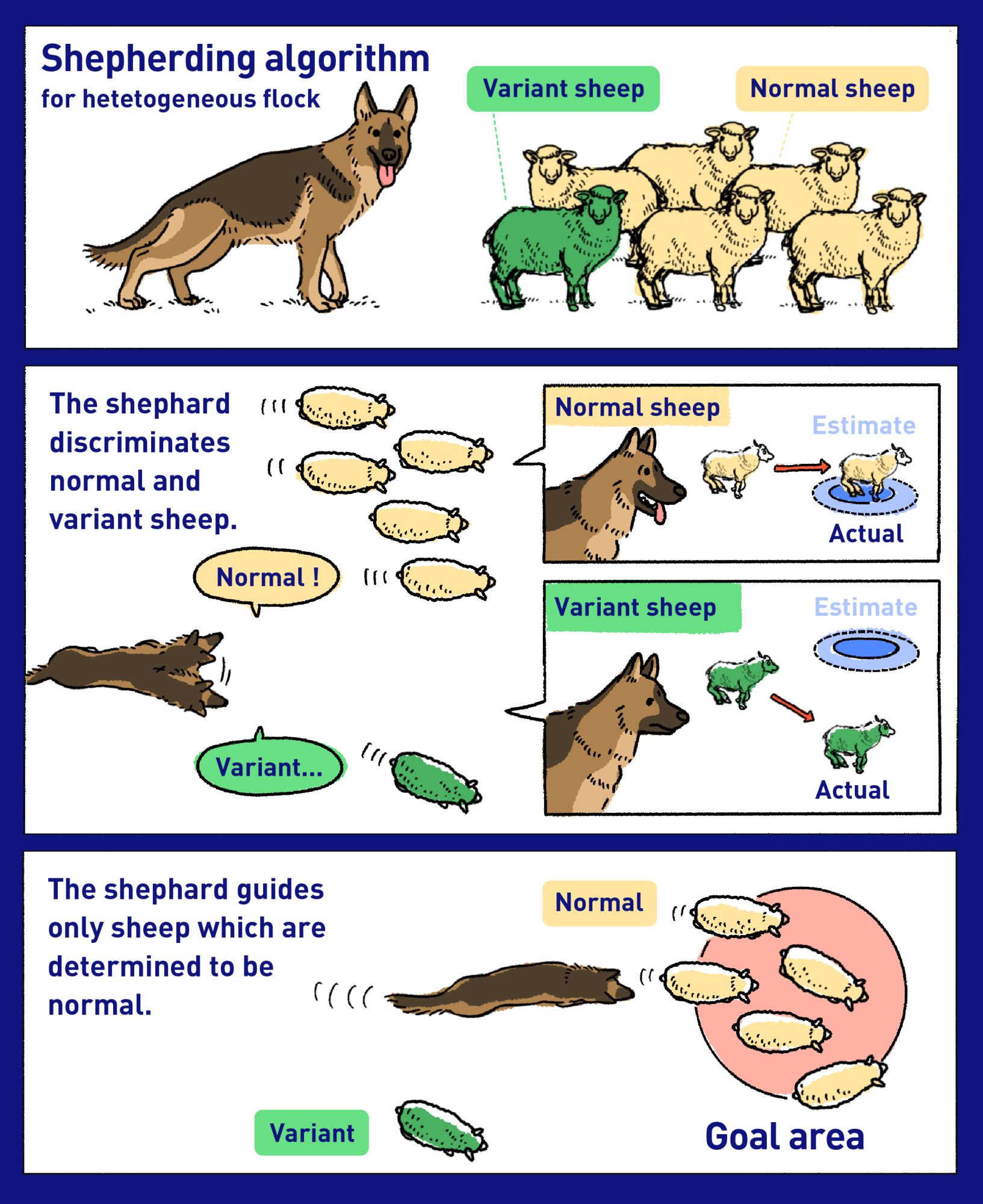
As an introduction to the shepherding algorithm, we created a game with Unity® .
You can play it on this page.
Please use it to deepen your understanding of our research!